 半年もご報告が遅れましたが、2024年2月末をもちまして無事に2023年度未踏アドバンスト事業の契約期間が終了しました。(下書きを書いてすっかり投稿した気になっており...パソコン整理をしていたところ原稿を発見,半年も遅れて投稿に至ります...すみません)
半年もご報告が遅れましたが、2024年2月末をもちまして無事に2023年度未踏アドバンスト事業の契約期間が終了しました。(下書きを書いてすっかり投稿した気になっており...パソコン整理をしていたところ原稿を発見,半年も遅れて投稿に至ります...すみません)
はじめに
内容は2021年未踏ITでやってきたことの延長線で、研究レベルでやってきた低遅延IP映像伝送をさらに社会実装するべく完成度を高め、実証実験などを行いビジネス展開を行なっていくということをやってきました。


この機会を通して、研究的な目線とビジネス的な目線の両方について考えることができるようになり、より見識が広がったことが一番の収穫だったと思います。また起業してやっていくために小手先でなく必要な実践的な勉強も多くできました。 www.shunkei.jp
最後のフィールドテストでは建設機械の遠隔操縦を行っている業者様にお邪魔して,開発した映像伝送装置を使っていただきました.実際に運用できる形に仕上げることで問題なく導入することができました.また,フィールドでもしっかり低遅延に映像伝送できていることを確認し,バックホウの遠隔オペレータの方に操縦し比べてもらいました.法面工事や水平引きなどのこれまではできなかった高度な操作ができるようになったと大変喜んでいただけました.
つくったもの
2021年の時点では基板丸出しでそのまま現場に持っていって使えるものではありませんでした. 実際にプロジェクト初期にはいきなり屋外の現場に持っていき建設機械の操作実験を行いました.しかし屋外現場でSSHするのは結構難しいことが判明(あたりまえ体操).
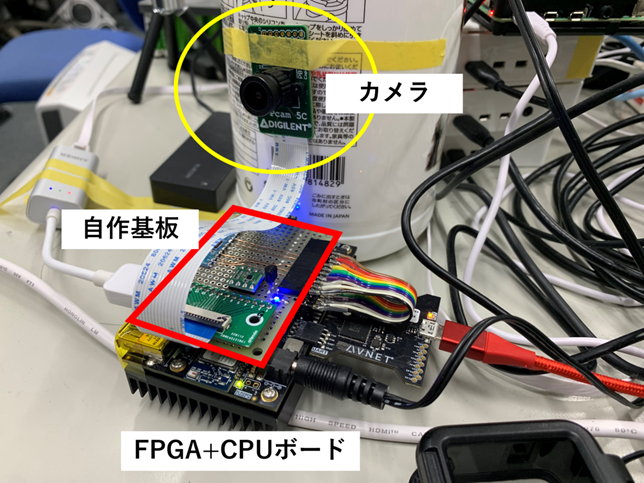

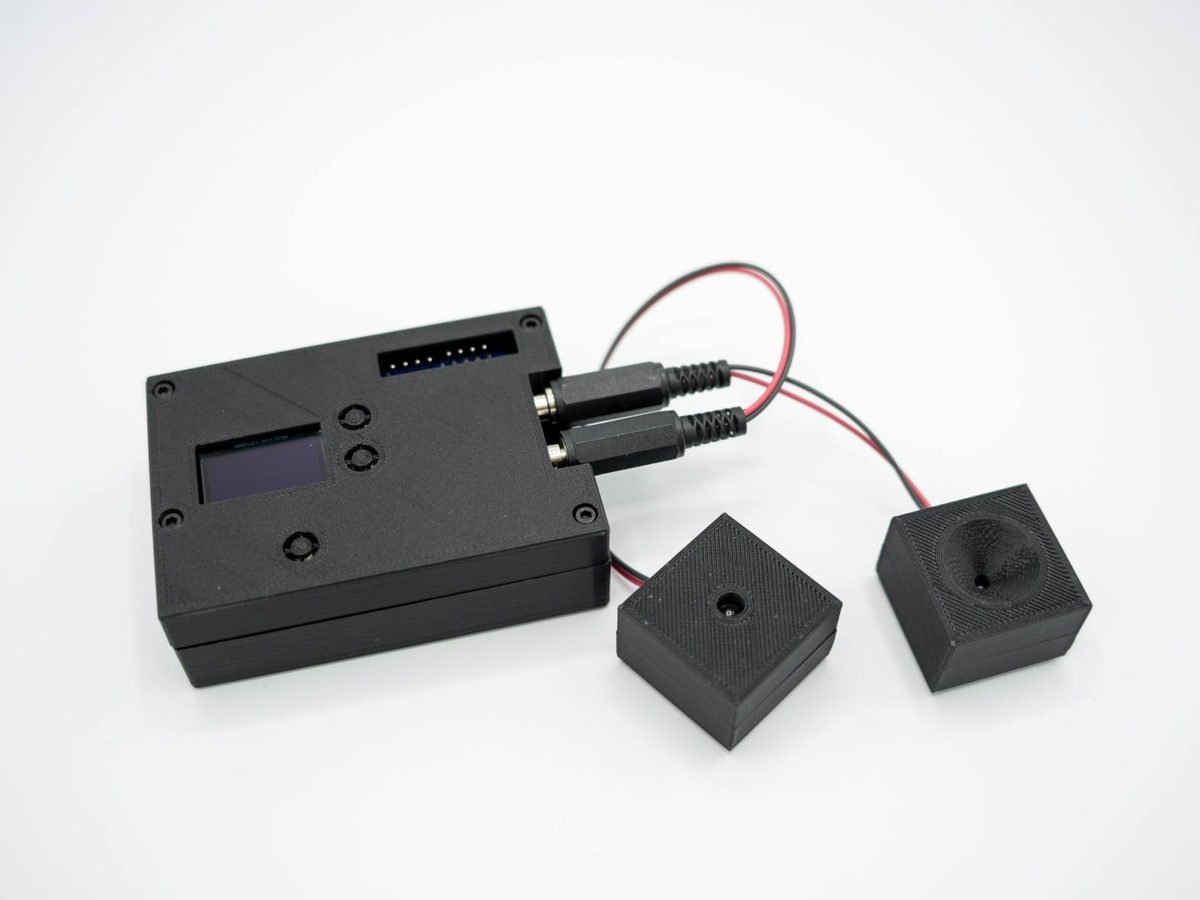
ちゃんとUIを考えて手間なく通信できるようなもの,筐体が必要だと考えました.そこで,写真のような映像送信&受信箱を開発しました.カメラ遅延からネットワーク遅延,ディスプレイ遅延まで含めた合計遅延が約30ms(ローカルネットワーク時)であり,カメラ遅延やディスプレイ遅延までハードウェアを使って最適化しています.フレームレートが30Hzなので本当はもう少し早くなりますが手が回ってません;;


また、低遅延といってもよくわからないと思うので実際に体験してもらうことを目的に写真のような操縦可能な1/10ラジコンカーの開発も行いました.車両→人からの映像だけでなく,人→車両のハンドルコントローラーの操縦信号や車両側からのテレメトリ(車両→人)も送受信することができこれ一つであらゆる遠隔操縦に対応することができます.



遅延も測れないと困るよねってことでカメラ→映像送信機→ネットワーク→映像受信機→ディスプレイの合計遅延(Glass-to-Glass遅延,Photon-to-Motion遅延とも呼ばれる)を測定できるシステムの開発もしました.これに関しては自分用に作っていてほかの人も使えるようにGUIをつけたり筐体に収めたり使いやすくしたものです.
ついでに,遅延内訳も図りたいよねってことで,HDMI入力ディスプレイ単体の遅延を測定できるシステムも内製しました.
あと,ネットワーク遅延(latency)やジッター,パケットロストの発生を再現するネットワークテスタ的なものも内製しました.ツマミで回して動くのでさっと取り出して動かすのにお便利ツールです.

おわりに
大変な期間でしたが、人生レベルで影響を及ぼす多くの収穫があったと思います。ハードウェアがからむプロジェクトであるにもかかわらず高速に,作って・実験・展示(評価)のサイクルを回せて良かったです.また,ハードウェア特有のビジネスとしての難しさも痛感しました.良い経験になったと思います.これらの経験ができたのも未踏アドバンスト事務局のご支援あったからこそでした.心より感謝いたします.


謝辞
無理なお願いにも関わらず一緒にプロジェクトに参加してくれた@ElnathGeekくんと@ebiyu_くんには感謝いたします。1人では到底達成困難でした。また、プロジェクト期間を通して様々な意見から守り・支えてくださった藤井PMとIPA未踏アドバンスト事務局には深く感謝いたします。
今後も面白いもの引き続き作って参ります.よろしくお願いします.